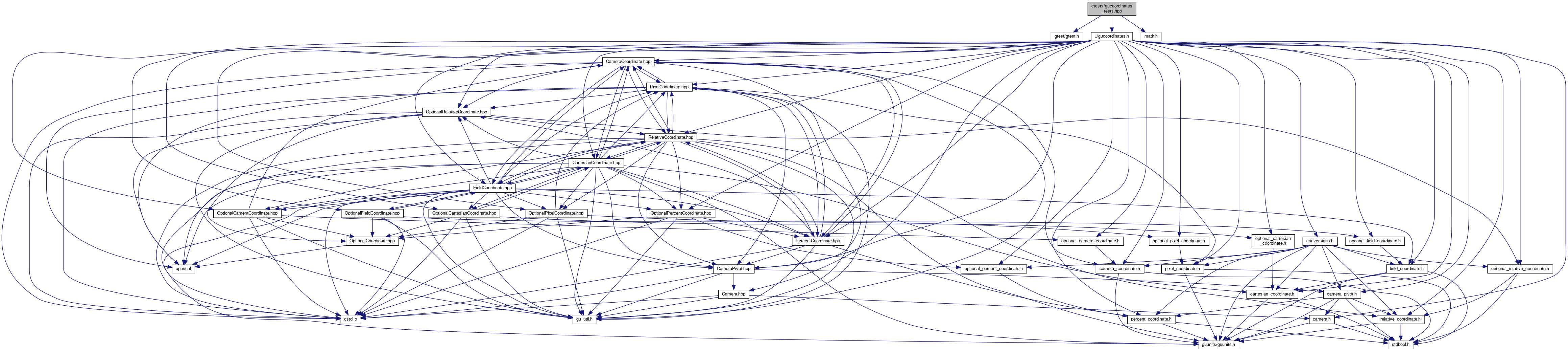
Include dependency graph for gucoordinates_tests.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | CGTEST::GUCoordinatesTests< Class > |
Namespaces | |
| namespace | CGTEST |
Macros | |
| #define | GU_NAO_V5_TOP_CAMERA gu_camera_make(6.364f, 5.871f, 1.2f, 47.64f, 60.97f) |
| #define | GU_NAO_V5_BOTTOM_CAMERA gu_camera_make(1.774f, 5.071f, 39.7f, 47.64f, 60.97f) |
| #define | GU_PEPPER_TOP_CAMERA gu_camera_make(115.3f, 8.68f, 0.0f, 44.3f, 55.2f) |
| #define | GU_PEPPER_BOTTOM_CAMERA gu_camera_make(105.15f, 9.36f, 40.0f, 44.3f, 55.2f) |
| #define | GU_NAO_V5_HEAD(p, y) (gu_camera_pivot) {.pitch = p, .yaw = y, .height = 41.7f, .cameras = {GU_NAO_V5_TOP_CAMERA, GU_NAO_V5_BOTTOM_CAMERA}, .numCameras = 2} |
| #define | GU_NAO_V5_TOP_CAMERA_INDEX 0 |
| #define | GU_NAO_V5_BOTTOM_CAMERA_INDEX 1 |
| #define | GU_PEPPER_HEAD(p, y) {p, y, 0.0f, {GU_PEPPER_TOP_CAMERA, GU_PEPPER_BOTTOM_CAMERA}, 2} |
| #define | GU_NAO_V5_ROBOT(hp, hy, x, y, t) (gu_robot) { .head = { hp, hy, 41.7f, {GU_NAO_V5_TOP_CAMERA, GU_NAO_V5_BOTTOM_CAMERA}, 2 }, .position = { { x, y }, t } } |
| #define | GU_PEPPER_ROBOT(hp, hy, x, y, t) (gu_robot) { .head = { hp, hy, 0.0f, {GU_PEPPER_TOP_CAMERA, GU_PEPPER_BOTTOM_CAMERA}, 2 }, .position = { { x, y }, t } } |
Macro Definition Documentation
◆ GU_NAO_V5_BOTTOM_CAMERA
| #define GU_NAO_V5_BOTTOM_CAMERA gu_camera_make(1.774f, 5.071f, 39.7f, 47.64f, 60.97f) |
Definition at line 81 of file gucoordinates_tests.hpp.
◆ GU_NAO_V5_BOTTOM_CAMERA_INDEX
| #define GU_NAO_V5_BOTTOM_CAMERA_INDEX 1 |
Definition at line 88 of file gucoordinates_tests.hpp.
◆ GU_NAO_V5_HEAD
| #define GU_NAO_V5_HEAD | ( | p, | |
| y | |||
| ) | (gu_camera_pivot) {.pitch = p, .yaw = y, .height = 41.7f, .cameras = {GU_NAO_V5_TOP_CAMERA, GU_NAO_V5_BOTTOM_CAMERA}, .numCameras = 2} |
Definition at line 86 of file gucoordinates_tests.hpp.
◆ GU_NAO_V5_ROBOT
| #define GU_NAO_V5_ROBOT | ( | hp, | |
| hy, | |||
| x, | |||
| y, | |||
| t | |||
| ) | (gu_robot) { .head = { hp, hy, 41.7f, {GU_NAO_V5_TOP_CAMERA, GU_NAO_V5_BOTTOM_CAMERA}, 2 }, .position = { { x, y }, t } } |
Definition at line 92 of file gucoordinates_tests.hpp.
◆ GU_NAO_V5_TOP_CAMERA
| #define GU_NAO_V5_TOP_CAMERA gu_camera_make(6.364f, 5.871f, 1.2f, 47.64f, 60.97f) |
Definition at line 80 of file gucoordinates_tests.hpp.
◆ GU_NAO_V5_TOP_CAMERA_INDEX
| #define GU_NAO_V5_TOP_CAMERA_INDEX 0 |
Definition at line 87 of file gucoordinates_tests.hpp.
◆ GU_PEPPER_BOTTOM_CAMERA
| #define GU_PEPPER_BOTTOM_CAMERA gu_camera_make(105.15f, 9.36f, 40.0f, 44.3f, 55.2f) |
Definition at line 84 of file gucoordinates_tests.hpp.
◆ GU_PEPPER_HEAD
| #define GU_PEPPER_HEAD | ( | p, | |
| y | |||
| ) | {p, y, 0.0f, {GU_PEPPER_TOP_CAMERA, GU_PEPPER_BOTTOM_CAMERA}, 2} |
Definition at line 90 of file gucoordinates_tests.hpp.
◆ GU_PEPPER_ROBOT
| #define GU_PEPPER_ROBOT | ( | hp, | |
| hy, | |||
| x, | |||
| y, | |||
| t | |||
| ) | (gu_robot) { .head = { hp, hy, 0.0f, {GU_PEPPER_TOP_CAMERA, GU_PEPPER_BOTTOM_CAMERA}, 2 }, .position = { { x, y }, t } } |
Definition at line 94 of file gucoordinates_tests.hpp.
◆ GU_PEPPER_TOP_CAMERA
| #define GU_PEPPER_TOP_CAMERA gu_camera_make(115.3f, 8.68f, 0.0f, 44.3f, 55.2f) |
Definition at line 83 of file gucoordinates_tests.hpp.