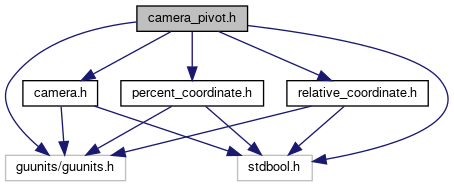
#include "camera.h"
#include <stdbool.h>
#include <guunits/guunits.h>
#include "percent_coordinate.h"
#include "relative_coordinate.h"
Go to the source code of this file.
◆ GU_CAMERA_PIVOT_NUM_CAMERAS
| #define GU_CAMERA_PIVOT_NUM_CAMERAS 2 |
◆ gu_camera_pivot
A gu_camera_pivot represents the pivot point which a gu_camera is attached to.
If a camera is on the ground, then there is no pivot point. If the camera is on the end of a stick then the pivot point is the bottom of the stick. If the camera is on the head of a robot, then the pivot point is the neck of the robot.
◆ gu_camera_pivot_calculate_camera_height()
| centimetres_d gu_camera_pivot_calculate_camera_height |
( |
const |
gu_camera_pivot, |
|
|
const int |
|
|
) |
| const |
◆ gu_camera_pivot_can_see_object()
| bool gu_camera_pivot_can_see_object |
( |
const |
gu_camera_pivot, |
|
|
const int |
, |
|
|
const |
gu_relative_coordinate |
|
) |
| const |
◆ gu_camera_pivot_equals()
| bool gu_camera_pivot_equals |
( |
const |
gu_camera_pivot, |
|
|
const |
gu_camera_pivot, |
|
|
const double |
|
|
) |
| const |
◆ gu_camera_pivot_object_on_ground()
| bool gu_camera_pivot_object_on_ground |
( |
const |
gu_camera_pivot, |
|
|
const int |
, |
|
|
const |
gu_percent_coordinate |
|
) |
| const |